

【導(dǎo)讀】測(cè)量物體的傾斜角度是加速度傳感器的一種常見(jiàn)應(yīng)用,雖然測(cè)試原理十分簡(jiǎn)單,但具體實(shí)現(xiàn)過(guò)程中仍然會(huì)遇到很多問(wèn)題,比如傾斜角度的精度問(wèn)題,環(huán)境干擾問(wèn)題。本文將對(duì)精度問(wèn)題進(jìn)行討論,并給出一種簡(jiǎn)化的計(jì)算方式。
基本原理
由于加速度傳感器在靜止放置時(shí)受到重力作用,因此會(huì)有1g的重力加速度。利用這個(gè)性質(zhì),通過(guò)測(cè)量重力加速度在X/Y軸上的分量,可以計(jì)算出在垂直平面上的傾斜角度。
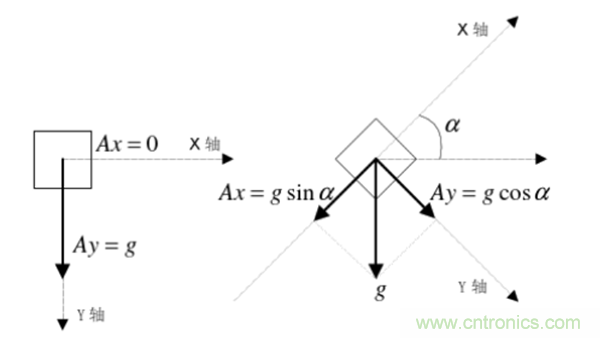
如圖所示,有Ax=gsinα,Ay=gcosα。則Ax/Ay=tanα,即α=arctan(Ax/Ay)。
根據(jù)以上原理就可以根據(jù)2軸加速度傳感器測(cè)量X-Y的平面上的傾斜角度。
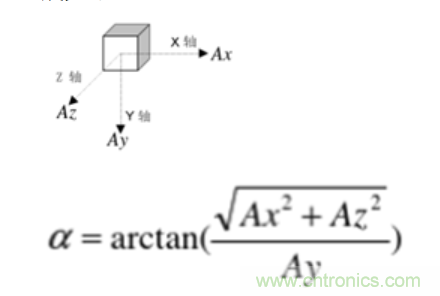
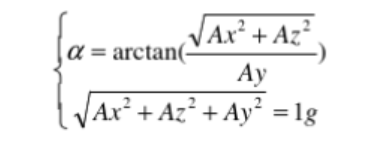
但是在實(shí)際應(yīng)用中,很難保證傾斜只發(fā)生在X-Y平面。因此,用三軸傳感器的傾角計(jì)算公式可拓展如下:
上述公式基本解決了靜態(tài)環(huán)境下的傾角計(jì)算,我們?cè)倏紤]一種更復(fù)雜的場(chǎng)景,運(yùn)動(dòng)條件下計(jì)算傾角,就需要再增加一個(gè)限定條件,即:
硬件實(shí)現(xiàn)
目前,在消費(fèi)類產(chǎn)品中使用的加速度主要為數(shù)字輸出(I2C/SPI),可以非常簡(jiǎn)單的跟MCU通信,實(shí)現(xiàn)測(cè)量功能。ST提供的產(chǎn)品按照精度分為L(zhǎng)IS2DH12TR(12bit),LIS2HH12TR(16bit),車規(guī)加速度AIS328DQTR(12bit)。
傾斜角度的精度和加速度值的分辨率之間的關(guān)系:
● 8bit的ADC可以得到3.4。以上的精度
● 10bit的ADC可以得到0.8。以上的精度
● 12bit的ADC可以得到0.2。以上的精度
● 14bit的ADC可以得到0.05。以上的精度
● 16bit的ADC可以得到0.0124。以上的精度
推薦閱讀:



